Билет 1.
Кинематика. Механическое движение. Материальная точка и абсолютно твердое тело. Кинематика материальной точки и поступательного движения твердого тела. Траектория, путь, перемещение, скорость, ускорение.
Билет 2.
Кинематика материальной точки.Скорость, ускорение.Тангенциальное, нормальное и полное ускорение.
Кинематика - раздел физики, изучающий движение тел, не интересуясь причинами, обуславливающие это движение.
Механи́ческое движе́ние - это изменение положения тела в пространстве относительно других тел с течением времени. (механическое движение характеризуется тремя физическими величинами: перемещением, скоростью и ускорением)
Характеристики механического движения связаны между собой основными кинематическими уравнениями:

Материальная точка - тело, размерами которого, в условиях данной задачи, можно принебреч.
Абсолютно твердое тело - тело, деформацией которого можно принебреч, в условиях данной задачи.
Кинематика материальной точки и поступательного движения твердого тела: ?
движение в прямоугольной, криволинейной системе координат
как записать в разных системах координат через радиус вектор
Траектория - некоторая линия, описываемая движение мат. точки.
Путь - скалярная величина, характеризующая длинну траектории движения тела.
Перемещение - нравленный отрезок прямой, проведенный из начального положения движущейся точки в ее конечное положение (векторная величина)
Скорость:
-векторная величина, характеризующая быстроту пермещения частицы по траектории, в который движется эта частица в каждый момент времени.
-производная радиуса вектора частицы по времени.
-производная от перемещения по времени.
Ускорение:
-векторная величина, характеризующая быстроту изменения вектора скорости.
-производная от скорости по времени.

Тангенциальное ускорение — направлено по касательной к траектории. Является составляющей вектора ускорения a. Характеризует изменение скорости по модулю.

Центростремительное или Нормальное ускорение — возникает при движении точки по окружности. Является составляющей вектора ускорения a. Вектор нормального ускорения всегда направлен к центру окружности.
Полное ускорекние - это корень квадатный из суммы квадратов нормально и тангенцального ускорений.


Билет 3
Кинематика вращательного движения материальной точки. Угловые величины. Связь между угловыми и линейными величинами.
Кинематика вращательного движения материальной точки.
Вращательное движение - движение, при котором все точки тела описывают окружности, центры которых лежат на одной прямой, называемой осью вращения.
Ось вращения проходит через центр тела, через тело, а может находится вне его.
Вращательное движение материальной точки - движение материальной точки по окружности.
Основные характеристики кинематики вращательного движения: угловая скорость, угловое ускорение.
Угловое перемещение - векторная величина, характеризующая изменение угловой координаты в процессе ее движения.
Угловая скорость - отношение угла поворота радиус-вектора точки к промежутку времени, за который произошел этот поворот.(направление вдоль оси вокруг которой вращается тело)
Частота вращения - физическая величина, измеряемая числом полных оборотов, совершаемых точкой в единицу времени при равномерном движении в одном направлении(n)
Период вращения - промежуток времени, в течение которого точка совершает полный оборот,
двигаясь по окружности (T)
N – число оборотов, совершаемых телом за время t. 

Угловое ускорение - величина харатеризующая изменение вектора угловой скорости со временем.
Связь между угловыми и линейными величинами:
 связь между линейной и угловой скоростью.
связь между линейной и угловой скоростью. связь между тангенциальным и угловым ускорением.
связь между тангенциальным и угловым ускорением. вязь между нормальным (центростремительным) ускорением, угловой скоростью и линейной скоростью.
вязь между нормальным (центростремительным) ускорением, угловой скоростью и линейной скоростью.Билет 4.
Динамика материальной точки. Классическая механика, границы ее применимости. Законы Ньютона. Инерциальные системы отсчета.
Динамика материальной точки:
-законы Ньютона
-законы сохранения(импульса, момента импульса, энергии)
Классическая механика — раздела физики, изучающей законы изменения положений тел и причины, это вызывающие, основанный на законах Ньютона и принципе относительности Галилея.
Классическая механика подразделяется на:
статику (которая рассматривает равновесие тел)
кинематику (которая изучает геометрическое свойство движения без рассмотрения его причин)
динамику (которая рассматривает движение тел).
Границы применимости класической механики:
-при скоростях, близких к скорости света, классическая механика перестаёт работать
-свойства микромира (атомов и субатомных частиц) не могут быть поняты в рамках классической механики
-классическая механика становится неэффективной при рассмотрении систем с очень большим числом частиц
Первый закон Ньютона (закон инерции):
Существуют такие системы отсчёта, относительно которых материальная точка при отсутствии внешних воздействий находится в состоянии покоя или движется равномерно и прямолинейно .
Второй закон Ньютона:
В инерциальной системе отсчета произведение массы тела на его ускорение равное действующей на тело силе.

Третий закон Ньютона:
Силы, с которыми действуют друг на друга взаимодействующие тела, равны по модулю и противоположы по напрвлению.

Система отсчета - совокупность неподвыжных относительно друг друга тел, по отношнию к которым рассматривается движения(включает в себя тело отсчета, систему уоординат,часы)
Инерциальная система отсчета - система отсчёта, в которой справедлив закон инерции: любое тело, на которое не действуют внешние силы или действие этих сил компенсируется, находится в состоянии покоя или равномерного прямолинейного движения.
Инертность - свойство присущее телам()для изменения скорости тела требуется время.
Масса - количесенная характеристика инертности.
Билет 5.
Цент масс (инерции) тела. Импульс материальной точки и твердого тела. Закон сохранения импульса. Движение центра масс.
Центр масс системы материальный точек - точка, положения которой характеризует распеределение массы системы в пространстве.
 распеределение масс в системе координат.
распеределение масс в системе координат.
Положение центра масс тела зависит от того, как распределяется по обьему тела его масса.
Движение центра масс определяется только внешними силами, действующими на систему.Внутрение силы системы не влияют на положение центра масс.
 положение центра масс.
положение центра масс.
Центр масс замкнутой системы движется прямолинейна и равномерно или остается неподвижным.
Импульс материальной точки - векторная величина равная произведению массы точки на ее скорость.

Импульс тела равен сумме импульсов его отдельных элементов.
Изменение импульса мат. точки пропорционален приложеной силе и имеет такое же направление, как и сила.
Импульс системы мат. точек могут изменить только внешние силы, причем изменение импульса системы пропорционально сумме внешних сил и совпадает с ней по направлению.Внутрение силы, изменяя импульсы отдельных тел системы, не изменяют сумарный импульс системы.
Закон сохранения импульса:
если сумма внешних сил, действующих на тело системы, равна нулю, то импульс системы сохраняется.
Билет 6.
Работа силы. Энергия. Мощность. Кинетическая и потенциальная энергия. Силы в природе.
Работа - физическая величина, характеризуюая результат действия силы и числено равная скалярному произведнию вектора силы и вектора перемещения, совершенно под действием этой силы.
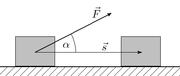 A = F · S ·cosа (а-угол между направлением силы и направлением перемещения)
A = F · S ·cosа (а-угол между направлением силы и направлением перемещения)
Работа не совершается если:
-сила действует, а тело не перемещается
-тело перемещается, а сила равна нулю
-угол м/д векторами силы и перемещения равен 90градусов
Мощность- физическая величина, характеризующаяскорость совершения работы и числено равная отношению работы к интервалу, за который работа совершена.
 средняя мощность;
средняя мощность;  мгновенная мощность.
мгновенная мощность.
Мощность показывает, какая работа совершеная за единицу времени.
Энергией - это скалярная физическая величина, являющаяся единой мерой различных форм движения материи и мерой перехода движения материи из одних форм в другие.
Механическая энергия - это величина характеризующая движение и взаимодействие тел и являющаяся функцией скоростей и взаимного расположения тел. Она равна сумме кинетической и потенциальной энергий.
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела.
Кинетическая энергия-энергия движения.

A = Ek2 – Ek1
Физическую величину, равную произведению массы тела на модуль ускорения свободного падения и на высоту, на которую поднято тело над поверхностью Земли, называют потенциальной энергией взаимодействия тела и Земли.
Потенциальная энергия-энергия взаимодействия.
Ep = m∙g∙h.
А= – (Ер2 – Ер1).
Силы:
1.Сила трения.
Трение – один из видов взаимодействия тел. Оно возникает при соприкосновении двух тел.Они возникают вследствие взаимодействия между атомами и молекулами соприкасающихся тел.(Силами сухого трения называют силы, возникающие при соприкосновении двух твердых тел при отсутствии между ними жидкой или газообразной прослойки.Сила трения покоя всегда равна по величине внешней силе и направлена в противоположную сторону.Если внешняя сила больше (Fтр)max, возникает трение скольжения.)
 μ называют коэффициентом трения скольжения.
μ называют коэффициентом трения скольжения.
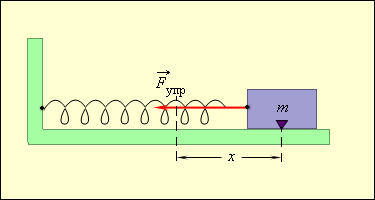
2.Сила упругости. Закон Гука.
При деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела - сила упрогости.
(пропорциональна деформации тела и направлена в сторону, противоположную направлению перемещения частиц тела при деформации)
Fупр = –kx.
Коэффициент k называется жесткостью тела.
Деформация растяжения (x > 0) и сжатия (x < 0).
 Закон Гука: относительная деформация ε пропорциональна напряжению σ, где Е- модуль Юнга.
Закон Гука: относительная деформация ε пропорциональна напряжению σ, где Е- модуль Юнга.
3.Сила реакции опоры.
Упругую силу действующую на тело со стороны опоры (или подвеса), называют силой реакции опоры. При соприкосновении тел сила реакции опоры направлена перпендикулярно поверхности соприкосновения.
 Весом тела называют силу, с которой тело вследствие его притяжения к Земле действует на опору или подвес.
Весом тела называют силу, с которой тело вследствие его притяжения к Земле действует на опору или подвес. 
4.Сила тяжести.  Одним из проявлений силы всемирного тяготения является сила тяжести.
Одним из проявлений силы всемирного тяготения является сила тяжести. 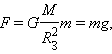
5.Грявитационаая сила(сила тяготения)
се тела притягиваются друг к другу с силой, прямо пропорциональной их массам и обратно пропорциональной квадрату расстояния между ними.

Билет 7.
Консервативные и диссипативные силы. Закон сохранения механичсекой энергии. Условие равновесия механической системы.
Консервати́вные си́лы (потенциальные силы) — силы, работа которых не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил)
Консервативные силы — такие силы, работа по любой замкнутой траектории которых равна 0.
 работа консервативных сил по произвольному замкнутому контуру равна 0;
работа консервативных сил по произвольному замкнутому контуру равна 0;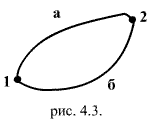
Силу  , действующую на материальную точку, называют консервативной или потенциальной, если работа
, действующую на материальную точку, называют консервативной или потенциальной, если работа  , совершаемая этой силой при перемещении этой точки из произвольного положения 1 в другое 2, не зависит от того, по какой траектории это перемещение произошло:
, совершаемая этой силой при перемещении этой точки из произвольного положения 1 в другое 2, не зависит от того, по какой траектории это перемещение произошло: 
Изменение направления движения точки вдоль траектории на противоположное вызывает изменение знака консервативной силы, так как величина  меняет знак. Поэтому при перемещении материальной точки вдоль замкнутой траектории
меняет знак. Поэтому при перемещении материальной точки вдоль замкнутой траектории  , например
, например  , работа консервативной силы равна нулю .
, работа консервативной силы равна нулю .
Примером консервативных сил могут служить силы всемирного тяготения, силы упругости, силы электростатического взаимодействия заряженных тел. Поле, работа сил которого по перемещению материальной точки вдоль произвольной замкнутой траектории равна нулю, называется потенциальным.
Диссипативные силы - силы, при действии которых на движущуюся механическую систему её полная механическая энергия убывает, переходя в другие, немеханические формы энергии, например в теплоту.
пример диссипативных сил: сила вязкого или сухого трения.
Закон сохранения механичсекой энергии:
Сумма кинетической и потенциальной энергии тел, составляющих замкнутую систему и взаимодействующих между собой посредством сил тяготения и сил упругости, остается неизменной.
Ek1 + Ep1 = Ek2 + Ep2
Замкнутая система- это система, на которую не действуют внешнии силы или из действие скомпенсировано.
Условие равновесия механической системы:
Статика - раздел механики, изучающмй условия равновесия тел.
Чтобы невращающееся тело находилось в равновесии, необходимо, чтобы равнодействующая всех сил, приложенных к телу, была равна нулю.

Если тело может вращаться относительно некоторой оси, то для его равновесия недостаточно равенства нулю равнодействующей всех сил.
Правило моментов: тело, имеющее неподвижную ось вращения, находится в равновесии, если алгебраическая сумма моментов всех приложенных к телу сил относительно этой оси равна нулю: M1 + M2 + ... = 0.
Длина перпендикуляра, проведенного от оси вращения до линии действия силы, называется плечом силы.
Произведение модуля силы F на плечо d называется моментом силы M. Положительными считаются моменты тех сил, которые стремятся повернуть тело против часовой стрелки.
Билет 8.
Кинематика вращательно движения твердого тела. Угловое перемещение, угловая скорость, угловое ускорение. Связь между линейными и угловыми характеристиками. Кинетическая энергия вращательного движения.
+Билет 3.
Для кинематического описания вращения твердого тела удобно использовать угловые величины: угловое перемещение Δφ, угловую скорость ω
В этих формулах углы выражаются в радианах. При вращении твердого тела относительно неподвижной оси все его точки движутся с одинаковыми угловыми скоростями и одинаковыми угловыми ускорениями. За положительное направление вращения обычно принимают направление против часовой стрелки.
Вращательно движение твердого тела :
1) вокруг оси - движение, при котором все точки тела, лежащие на оси вращения, неподвижны, а остальные точки тела описывают окружности с центрами на оси;
2) вокруг точки - движение тела, при котором одна его точка О неподвижна, а все другие движутся по поверхностям сфер с центром в точке О.
Кинетическая энергия вращательного движения.
Кинетическая энергия вращательного движения – энергия тела связанная с его вращением.
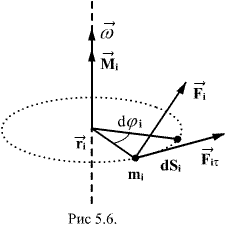
Разобьем вращающееся тело на малые элементы Δmi. Расстояния до оси вращения обозначим через ri, модули линейных скоростей – через υi. Тогда кинетическую энергию вращающегося тела можно записать в виде:

Физическая величина  зависит от распределения масс вращающегося тела относительно оси вращения. Она называется моментом инерции I тела относительно данной оси:
зависит от распределения масс вращающегося тела относительно оси вращения. Она называется моментом инерции I тела относительно данной оси:

В пределе при Δm → 0 эта сумма переходит в интеграл.
Таким образом, кинетическую энергию твердого тела, вращающегося относительно неподвижной оси, можно представить в виде:

Кинетическая энергия вращательного движения определяется моментом инерции тела относительно оси вращения и его угловой скоростью.
Билет 9.
Динамика вращательного движения. Момент силы. Момент инерции. Теорема Штейнера.
Момент силы - величина, характеризующая вращательный эффект силы при действии её на твёрдое тело. Различают Момент силы относительно центра (точки) и относительно оси.
1.Момент силы относительно центра О величина векторная. Его модуль Mo = Fh, где F - модуль силы, a h - плечо (длина перпендикуляра, опущенного из О на линию действия силы)
С помощью векторного произведения момент силы выражается равенством Mo = [rF], где r - радиус-вектор, проведённый из О в точку приложения силы.
2.Момент силы относительно оси величина алгебраическая, равная проекции на эту ось.
Момент силы (крутящий момент; вращательный момент; вращающий момент) — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.



это выражение является вторым законом Ньютона для вращательного движения.
Оно справедливо только тогда:
а) если под моментом М понимают часть момента внешней силы, под действием которой происходит вращение тела вокруг оси - это тангенциальная составляющая.
б) нормальная составляющая из момента силы не участвует во вращательном движении, так как Mn старается сместить точку с траектории, и по определению тождественно равна 0, при r- const Mn=0, а Mz - определяет силу давления на подшипники.
Момент инерции - скалярная физическая величина, мера инертности тела во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении.
Момент инерции зависит от массы тела и от расположения частиц тела относительно оси вращения.
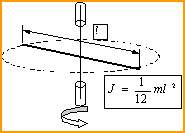
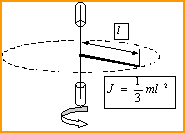
Тонкий обруч Стрежень (закреп. по середине) Стержень См.
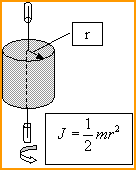
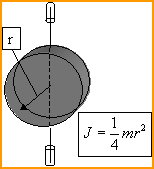
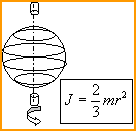
Однородный цилиндр Диск Шар. 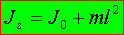
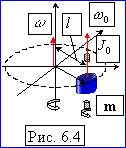
(справа картинка к пункту 2 в т. Штейнера)
Теорема Штейнера.
Момент инерции данного тела относительно, какой либо данной оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси.
Согласно теореме Гюйгенса - Штейнера - момент инерции тела J относительно произвольной оси равен сумме:
1)момента инерции этого тела Jо, относительно оси, проходящий через центр масс этого тела, и параллельной рассматриваемой оси,
2) произведения массы тела на квадрат расстояния между осями.
Билет 10.
Момент импульса. Основное уравнение динамики вращательного движения (уравнение моментов). Закон сохранения моментов импульса.
Момент импульса - физическая величина, зависящая от того сколько массы вращается и как она распределена относительно оси вращения и с какой скоростью происходит вращение.
Момент импульса относительно точки — это псевдовектор.
Момент импульса относительно оси — скалярная величина.
Момент импульса L частицы относительно некоторого начала отсчёта определяется векторным произведением ее радиус-вектора и импульса: L=[rP]
r - радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчета начала отсчёта.
P - импульс частицы.
L = rp sinА = p l;
Для систем, совершающих вращение вокруг одной из осей симметрии (вообще говоря, вокруг так называемых главных осей инерции), справедливо соотношение:
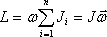 момент импульса тела относительно оси вращения.
момент импульса тела относительно оси вращения.
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частей.
Уравнение моментов.
Производная по времени момента импульса материальной точки относительно неподвижной оси равна моменту силы, действующей на точку, относительно той же оси:
M=JE=J dw/dt=dL/dt
Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.
М=0
=> dL/dt=0 т.е. L=const
Билет 11.
Работа и кинетическая энергия при вращательном движении. Кинетическая энергия при плоском движении.
+Билет 8.

 - внешняя силв приложенная к точке массой
- внешняя силв приложенная к точке массой 
 - путь который проходит масса за время dt
- путь который проходит масса за время dt
Но  равна модулю момента
равна модулю момента  силы относительно оси вращения.
силы относительно оси вращения.
следовательно 
с учетом, что 
получим выражение для работы: 
Работа вращательного движения равна работе затраченой на поворот всего тела.
Работа при вращательном движении идет на увеличении кинетической энергии:
dA=dT
Плоское (плоскопараллельным) движение - это такое движение, при котором все его точки перемещаются параллельно некоторой неподвижной плоскости.
Кинетическая энергия при плоском движении равна сумме кинетических энергий поступательного и вращательного движений:

Билет 12.
Гармонические колебания. Свободные незатухающие колебания. Гармонический осциллятор. Дифференциальное уравнение гармонического осциллятора и его решение. Характеристики незатухающих колебаний. Скорость и ускорение в незатухающих колебаниях.
Механическими колебаниями называют движения тел, повторяющиеся точно (или приблизительно) через одинаковые промежутки времени. Закон движения тела, совершающего колебания, задается с помощью некоторой периодической функции времени x = f (t).
Механические колебания, как и колебательные процессы любой другой физической природы, могут быть свободными и вынужденными.
Свободные колебания совершаются под действием внутренних сил системы, после того, как система была выведена из состояния равновесия. Колебания груза на пружине или колебания маятника являются свободными колебаниями. Колебания, происходящие под действием внешних периодически изменяющихся сил, называются вынужденными.
Гармоническое колебание — явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса.
Колебания называются гармоническими, если выполнятся следующие условия:
1) колебания маятника продолжаются бесконечно (так как нет необратимых преобразований энергии);
2) его максимальное отклонение вправо от положения равновесия равно максимальному отклонению влево;
3) время отклонения вправо равно времени отклонения влево;
4) характер движения вправо и влево от положения равновесия одинаков.


Х = Хm cos (ωt + φ0).
V= -A wo sin(wo+ φ)=A wo cos(wo t+ φ+П/2)
a= -A wo*2 cos(wo t+ φ)= A wo*2 cos(wo t+ φ+П)
x – смещение тела от положения равновесия,
xm – амплитуда колебаний, т. е. максимальное смещение от положения равновесия,
ω – циклическая или круговая частота колебаний,
t – время.
φ = ωt + φ0 называется фазой гармонического процесса
φ0 называют начальной фазой.

Минимальный интервал времени, через который происходит повторение движения тела, называется периодом колебаний T
Частота колебаний f показывает, сколько колебаний совершается за 1 с.
Незатухающие колебания - колебания с постоянной амплитудой.
Затухающие колебания - колебания, энергия которых уменьшается с течением времени.
Свободные незатухающие колебания:
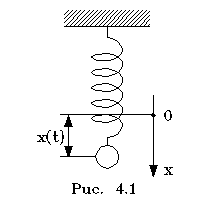
Рассмотpим пpостейшую механическую колебательную систему – маятник в не вязкой среде.
Запишем уpавнение движения согласно втоpому закону Ньютона:
Запишем это уpавнение в пpоекциях на ось х.Пpоекцию ускорения на ось х пpедставим как втоpую пpоизводную от кооpдинаты х по вpемени.

Обозначим k/m чеpез w2, и пpедадим уpавнению вид :
Где 
Решением нашего уpавнения является функция вида:

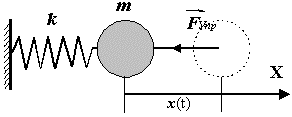
Гармонический осциллятор — это система, которая при смещении из положения равновесия испытывает действие возвращающей силы F, пропорциональной смещению x(согласно закону Гука):

k — положительная константа, описывающая жёсткость системы.
1.Если F единственная сила, действующая на систему, то систему называют простым или консервативным гармоническим осциллятором.
2.Если имеется ещё и сила трения (затухание), пропорциональная скорости движения (вязкое трение), то такую систему называют затухающим или диссипативным осциллятором.
Дифференциальное уравнение гармонического осциллятора и его решение:
В качестве модели консервативного гармонического осциллятора возьмём груз массы m , закреплённый на пружине жёсткостью k. Пусть x - это смещение груза относительно положения равновесия. Тогда, согласно закону Гука, на него будет действовать возвращающая сила:
Используя второй закон Ньютона, запишем:

Обозначая  и заменяя ускорение
и заменяя ускорение  на вторую производную от координаты по времени
на вторую производную от координаты по времени  , напишем:
, напишем:
Это дифференциальное уравнение описывает поведение консервативного гармонического осциллятора. Коэффициент ω0 называют циклической частотой осциллятора.
Будем искать решение этого уравнения в виде:

Здесь  — амплитуда,
— амплитуда,  — частота колебаний (пока не обязательно равная собственной частоте),
— частота колебаний (пока не обязательно равная собственной частоте),  — начальная фаза.
— начальная фаза.
Подставляем в дифференциальное уравнение.


Амплитуда сокращается. Значит, она может иметь любое значение (в том числе и нулевое — это означает, что груз покоится в положении равновесия). На синус также можно сократить, так как равенство должно выполняться в любой момент времени t. И остаётся условие на частоту колебаний:

Отрицательную частоту можно отбросить, так как произвол в выборе этого знака покрывается произволом выбора начальной фазы.
Общее решение уравнения записывается в виде:

де амплитуда A и начальная фаза — произвольные постоянные.
Кинетическая энергия записывается в виде:

и потенциальная энергия есть

Характеристики незатухающих колебаний:
-амплитуда не меняется
-частота зависит от жесткости и массы (пружина)
Скорость незатухающих колебаний:
Ускорение незатухающих колебаний:
Билет 13.
Свободные затухающие колебания. Дифференциальное уравнение и его решение. Декремент, логарифмический декремент, коэффицент затухания. Время релаксации.
Свободные затухающие колебания
Если можно пренебречь силами сопротивления движению и трением, то при выведении системы из положения равновесия на груз будет действовать только сила упругости пружины.
Запишем уравнение движения груза, составленное по 2-му закону Ньютона:

Спроектируем уравнение движения на ось X.
преобразуем: 
т.к. 
это дифференциальное уравнение свободных гармонических незатухающих колебаний.
Решение уравнения имеет вид:

Дифференциальное уравнение и его решение:
Во всякой колебательной системе имеются силы сопротивления, действие которых приводит к уменьшению энергии системы. Если убыль энергии не восполняется за счет работы внешних сил, колебания будут затухать.
Сила сопротивления пропорциональна величине скорости:
r – постоянная величина, называемая коэффициентом сопротивления. Знак минус обусловлен тем, что сила и скорость имеют противоположные направления.
Уравнение второго закона Ньютона при наличии сил сопротивления имеет вид:
Применив обозначения  ,
,  , перепишем уравнение движения следующим образом:
, перепишем уравнение движения следующим образом:
Это уравнение описывает затухающие колебания системы
Решение уравнения имеет вид:

Каэффицент затухания - величина обратная пропорциональная времени в течении которого амплитуда уменшилась в е раз.

Время, по истечении которого амплитуда колебаний уменьшается в е раз, называется временем затухания 
За это время система совершает  колебаний.
колебаний.
Декремент затухания, количественная характеристика быстроты затухания колебаний,представляет собой натуральный логарифм отношения двух последующих максимальных отклонений колеблющейся величины в одну и ту же сторону.

Логарифмическим декрементом затухания называется логарифм отношения амплитуд в моменты последовательных прохождений колеблющейся величины через максимум или минимум(затухание колебаний принято характеризовать логарифмическим декрементом затухания):
Он связан с числом колебаний N соотношением: 
Время релаксации - время в течении которого амплитуда затухающего колебания уменьшается в е раз.
Билет 14.
Вынужденные колебания. Полное дифференциальное уравнение вынужденных колебаний и его решение. Период и амплитуда вынужденных колебаний.
Вынужденные колебания — колебания, происходящие под воздействием внешних сил, меняющихся во времени.
Второй закон Ньютона для т осциллятора (маятника) запишется в виде:

Если 
и заменить ускорение на вторую производную от координаты по времени, то получим следующее дифференциальное уравнение:

Общее решение однородного уравнения:
где A,φ произвольные постоянные
Найдём частное решение. Подставим в уравнение решение вида:  и получим значение для константы:
и получим значение для константы:

Тогда окончательное решение запишется в виде:

Характер вынужденных колебаний зависит от характера действия внешней силы, от ее величины, направления, частоты действия и не зависит от размеров и свойств колеблющегося тела.
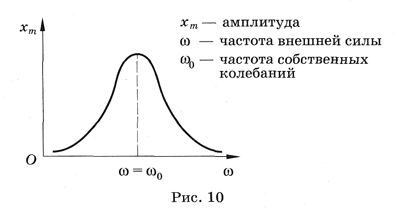
Зависимость амплитуды вынужденных колебаний от частоты действия внешней силы.
Период и амплитуда вынужденных колебаний:
Амплитуда зависит от частоты вынужденных колебаний, если частота равняет резонансной частоте, то амплитуда максимальнее. Так же зависит от коэффициента затухания, если он равнее 0, то амплитуда бесконечна.
Период связан с частотой, вынужденый колебания могут иметь любой период.
Билет 15.
Вынужденные колебания. Период и амплитуда вынужденых колебаний. Частота колебаний. Резонанс, резонансная частота. Семейство резонансных кривых.
+ Билет 14.
При совпадении частоты внешней силы и частоты собственных колебаний тела амплитуда вынужденных колебаний резко возрастает. Такое явление называют механическим резонансом.
Резона́нс— явление резкого возрастания амплитуды вынужденных колебаний.
Увеличение амплитуды — это лишь следствие резонанса, а причина — совпадение внешней частоты с внутренней частотой колебательной системы.
Резонансная частота – частота, в которой амплитуда максимальна (немного меньше собственной частоты)
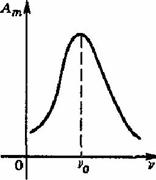
График зависимости амплитуды вынужденных колебаний от частоты вынуждающей силы называется резонансной кривой.
В зависимости от коэффициента затухания получаем семейство резонансных кривых, чем коэффициент, меньше тем кривая больше и выше.
Билет 16.
Сложение колебаний одного направления. Векторная диаграмма. Биения.
Сложение нескольких гармонических колебаний одного направления и одинаковой частоты становится наглядным, если изображать колебания графически в виде векторов на плоскости. Полученная таким способом схема называется векторной диаграммой.
Рассмотрим сложение двух гармонических колебаний одного направления и одинаковой частоты:


Представим оба колебания с помощью векторов A1и А2. Построим по правилам сложения векторов результирующий вектор А, проекция этого вектора на ось x равна сумме проекций складываемых векторов: 
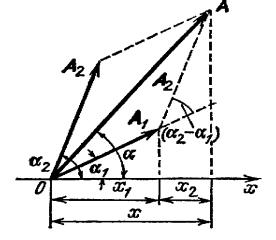
Поэтому, вектор A представляет собой результирующее колебание. Этот вектор вращается с той же угловой скоростью как и векторы А1 и А2, так что сумма x1 и х2 является гармоническим колебанием с такой же частотой, амплитудой и фазой.Используя теорему косинусов получаем, что

Представление гармонических колебаний с помощью векторов позволяет заменить сложение функций сложением векторов, что значительно проще.
Биения - колебания с периодически меняющейся амплитудой, возникающие в результате наложения двух гармонических колебаний с несколько различными, но близкими частотами.
Билет 17.
Сложение взаимно перпендикулярных колебаний. Связь между угловой скоростью вращательного движения и циклической частотой. Фигуры Лиссажу.
Сложение взаимно перпендикулярных колебаний:
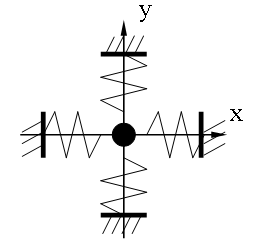
Колебания в двух взаимно перпендикулярных направлениях происходят независимо друг от друга:

Здесь собственные частоты гармонических колебаний равны:
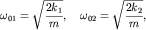
Рассмотрим траекторию движения грузов:
в ходе преобразований получим:

Таким образом, груз будет совершать периодические движения по эллиптической траектории. Направление движения вдоль траектории и ориентация эллипса относительно осей зависят от начальной разности фаз 

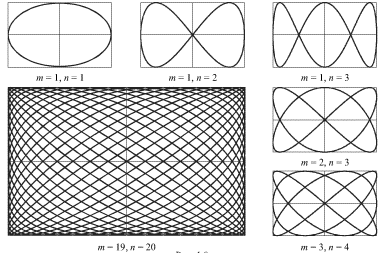
Если частоты двух взаимно-перпендикулярных колебаний не совпадают, но являются кратными, то траектории движения представляют собой замкнутые кривые, называемые фигурами Лиссажу. Отметим, что отношение частот колебаний равно отношению чисел точек касания фигуры Лиссажу к сторонам прямоугольника, в который она вписана.
Билет 18.
Колебания груза на пружине. Математический и физический маятник. Характеристики колебаний.
Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению.
F (t) = ma (t) = –m ω2 x (t)
Fупр = –kx закон Гука.
Круговая частота ω0 свободных колебаний груза на пружине находится из второго закона Ньютона:

Частота ω0 называется собственной частотой колебательной системы.
Поэтому второй закон Ньютона для груза на пружине может быть записан в виде:
или
 где
где 
Решением этого уравнения являются гармонические функции вида:
x = xm cos (ωt + φ0).
Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость 
то 

Математи́ческий ма́ятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки, подвешенной на невесомой нерастяжимой нити или на невесомом стержне в поле тяжести. Период малых колебаний математического маятника длины l в поле тяжести с ускорением свободного падения g равен

и мало зависит от амплитуды и массы маятника.
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела
Билет 19.
Волновой процесс. Упругие волны. Продольные и поперечные волны. Уравнение плоской волны. Фазовая скорость. Волновое уравнение и его решение.
Волна — это явление распространения в пространстве с течением времени возмущения физической величины.
В зависимости от физической среды, в которой распространяются волны, различают:
-волны на поверхности жидкости;
-упругие волны (звук, сейсмические волны);
-объёмные волны (распространяющиеся в толще среды);
-электромагнитные волны (радиоволны, свет, рентгеновские лучи);
-гравитационные волны;
-волны в плазме.
По отношению к направлению колебаний частиц среды:
-продольные волны (волны сжатия, P-волны) — частицы среды колеблются параллельно (по) направлению распространения волны (как, например, в случае распространения звука);
-поперечные волны (волны сдвига, S-волны) — частицы среды колеблются перпендикулярно направлению распространения волны (электромагнитные волны, волны на поверхностях разделения сред);
-волны смешанного типа.
По виду фронта волны (поверхности равных фаз):
-плоская волна — плоскости фаз перпендикулярны направлению распространения волны и параллельны друг другу;
-сферическая волна — поверхностью фаз является сфера;
-цилиндрическая волна — поверхность фаз напоминает цилиндр.
Упру́гие во́лны (звуковые волны) — волны, распространяющиеся в жидких, твёрдых и газообразных средах за счёт действия упругих сил.
Поперечные волны, волны, распространяющиеся в направлении, перпендикулярном к плоскости, в которой ориентированы смещения и колебательные скорости частиц.
Продольные волны, волны, направление распространения которых совпадает с направлением смещений частиц среды.
Плоская волна, волна, в которой всем точкам, лежащим в любой плоскости, перпендикулярной к направлению её распространения, в каждый момент соответствуют одинаковые смещения и скорости частиц среды
Уравнение плоской волны:

Фа́зовая ско́рость — скорость перемещения точки, обладающей постоянной фазой колебательного движения, в пространстве вдоль заданного направления.
Геометрическое место точек, до которых доходят колебания к моменту времени t, называется волновым фронтом.
Геометрическое место точек, колеблющихся в одинаковой фазе, называется волновой поверхностью.
Волновое уравнение и его решение:
Распространение волн в однородной изотропной среде в общем случае описывается волновым уравнением - дифференциальным уравнением в частных производных.
 где
где 
Решением уравнения является уравнение любой волны, которое имеет вид:
Билет 20.
Перенос энергии бегущей волной. Вектор Умова. Сложение волн. Принцип суперпозиции. Стоячая волна.
Волна — изменение состояния среды, распространяющееся в этой среде и переносящее с собой энергию. (волной называют изменяющееся со временем пространственное чередование максимумов и минимумов любой физической величины, например, плотности вещества, напряжённости электрического поля, температуры)
Бегущая волна — волновое возмущение, изменяющееся во времени t и пространстве z согласно выражению:

где  — амплитудная огибающая волны, K — волновое число и
— амплитудная огибающая волны, K — волновое число и  — фаза колебаний. Фазовая скорость
— фаза колебаний. Фазовая скорость этой волны даётся выражением
этой волны даётся выражением
где  — это длина волны.
— это длина волны.
Перенос энергии — упругая среда, в которой распространяется волна, обладает как кинетической энергией колебательного движения частиц так и потенциальной энергией, обусловленной деформацией среды.
Бегущая волна, при распространении в среде переносит энергию (в отличие от стоячей волны).
Стоячая волна — колебания в распределенных колебательных системах с характерным расположением чередующихся максимумов (пучностей) и минимумов (узлов) амплитуды. Практически такая волна возникает при отражениях от преград и неоднородностей в результате наложения отражённой волны на падающую.При этом крайне важное значение имеет частота, фаза и коэффициент затухания волны в месте отражения.Примерами стоячей волны могут служить колебания струны, колебания воздуха в органной трубе
Вектор Умова (Умова-Пойнтинга) - вектор плотности потока энергии физического поля; численно равен энергии, переносимой в единицу времени через единичную площадку, перпендикулярную направлению потока энергии в данной точке.
При́нцип суперпози́ции — один из самых общих законов во многих разделах физики.
В самой простой формулировке принцип суперпозиции гласит: результат воздействия на частицу нескольких внешних сил есть просто сумма результатов воздействия каждой из сил.
Принцип суперпозиции может принимать и иные формулировки, которые, подчеркнём, полностью эквивалентны приведённой выше:
-Взаимодействие между двумя частицами не изменяется при внесении третьей частицы, также взаимодействующей с первыми двумя.
-Энергия взаимодействия всех частиц в многочастичной системе есть просто сумма энергий парных взаимодействий между всеми возможными парами частиц. В системе нет многочастичных взаимодействий.
-Уравнения, описывающие поведение многочастичной системы, являются линейными по количеству частиц.
Сложение волн - сложение колебаний в каждой точке.
Сложение стоячих волн - сложение двух одинаковых волн распростроняющихся в разных напрвлениях.
Билет 21.
Инерциальные и неинерциальные системы отсчета. Принцип относительности Галилео.
Инерциальные - такие системы отсчета, в которых тело, на которое не действуют силы, или они уравновешены, находится в состоянии покоя или движется равномерно и прямолинейно
Неинерциальная система отсчёта — произвольная система отсчёта, не являющаяся инерциальной. Примеры неинерциальных систем отсчета: система, движущаяся прямолинейно с постоянным ускорением, а также вращающаяся система
Принцип относительности Галилея— фундаментальный физический принцип, согласно которому все физические процессы в инерциальных системах отсчёта протекают одинаково, независимо от того, неподвижна ли система или она находится в состоянии равномерного и прямолинейного движения.
Отсюда следует, что все законы природы одинаковы во всех инерциальных системах отсчёта.
Билет 22.
Физические основы молекулярно-кинетической теории. Основные газовые законы. Уравнение состояния идеального газа. Основное уравнение молекулярно-кинетической теории.
Молекулярно-кинетическая теория (сокращённо МКТ) — теория, рассматривавшая строение вещества, в основном газов, с точки зрения трёх основных приближенно верных положений:
все тела состоят из частиц, размером которых можно пренебречь: атомов, молекул и ионов;
частицы находятся в непрерывном хаотическом движении (тепловом);
частицы взаимодействуют друг с другом путём абсолютно упругих столкновений.
Основными доказательствами этих положений считались:
Диффузия
Броуновское движение
Изменение агрегатных состояний вещества
уравнение Клапейрона — Менделеева - формула, устанавливающая зависимость между давлением, молярным объёмом и абсолютной температурой идеального газа.
PV = υRT υ = m/μ
Закон Бойля — Мариотта гласит:
При постоянной температуре и массе идеального газа произведение его давления и объёма постоянно
pV = const,
где p — давление газа; V — объём газа
Гей-Люссака - V / T = const
Шарля - P / T = const
Бойля — Мариотта – PV= const
Закон Авогадро — одно из важных основных положений химии, гласящее, что «в равных объёмах различных газов, взятых при одинаковых температуре и давлении, содержится одно и то же число молекул».
следствие из закона Авогадро: один моль любого газа при одинаковых условиях занимает одинаковый объём.
В частности, при нормальных условиях, т.е. при 0° С (273К) и 101,3 кПа, объём 1 моля газа, равен 22,4 л/моль. Этот объём называют молярным объёмом газа Vm
Законы Дальтона:
Закон о суммарном давлении смеси газов - Давление смеси химически не взаимодействующих идеальных газов равно сумме парциальных давлений
P общ = P1 + P2 + … + Pn
Закон о растворимости компонентов газовой смеси - При постоянной температуре растворимость в данной жидкости каждой из компонентов газовой смеси, находящейся над жидкостью, пропорциональна их парциальному давлению
Оба закона Дальтона строго выполняются для идеальных газов. Для реальных газов эти законы применимы при условии, если их растворимость невелика, а поведение близко к поведению идеального газа.
Уравнение состояний идеального газа – см. уравнение Клапейрона — Менделеева PV = υRT υ = m/μ
следующая страница >>
Смотрите также:
